Inference is done pixel by pixel.
For every pixel its membership (similarity) to soil type k is computed as the following:
Inference of Instances
SoLIM uses the MIN operation in fuzzy logic to integrate the optimality values derived from individual rules for a given instance of soil type k. In other words, it chooses the minimum value among those values as the overall output value for the instance. The theoretical basis for this option is the limiting-factor principle in ecology.
If there are more than one instances, the maximum of the values from instances will be chosen to be the final optimality value related to the global knowledge for soil type k.
Inference of occurrences
An occurrence has two parts: rule part and spatial setting. If the pixel falls into the influenced area of an occurrence, for the rule part SoLIM Solutions uses the MIN operation in fuzzy logic to integrate the optimality values derived from individual rules. This process is the same as the inference of a single instance stated in the "Inference of Instance" section above.
If distance similarity for this occurrence is disabled, then the minimum optimality value will be the overall output value for this occurrence. If the distance similarity is enabled, SoLIM Solutions uses the spatial setting to adjust the optimality value calculated using the rule part. The basic idea is that the geographically closer a location to an occurrence's central location, the more impact the occurrence will exert on the location, and the further a location to the occurrence's central location, the less impact the occurrence will exert on the location. The function of this adjustment is shown a below:
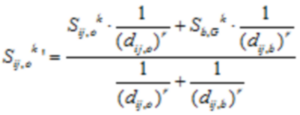
The meanings of the symbols in the equation are described as follows:
![]() : the adjusted optimality value at location (i, j) calculated based on occurrence o.
: the adjusted optimality value at location (i, j) calculated based on occurrence o.
![]() : the optimality value calculated using the rule part of occurrence o.
: the optimality value calculated using the rule part of occurrence o.
b : when we draw a straight line that passes the central point and the pixel to be inferred, it will have two intersections with the boundary of the influenced area of occurrence o. Of the two points, b is the one that is on the same side with the pixel to be inferred.
![]() : the distance (surface distance or horizontal distance) between the location (i, j) and occurrence o.
: the distance (surface distance or horizontal distance) between the location (i, j) and occurrence o.
![]() : the distance (surface distance or horizontal distance) between the location (i, j) and boundary point b.
: the distance (surface distance or horizontal distance) between the location (i, j) and boundary point b.
![]() : the optimality value at boundary point b calculated based on the global knowledge (instances).
: the optimality value at boundary point b calculated based on the global knowledge (instances).
r : distance decay factor
Inference of exclusions
Similar to an occurrence, an exclusion also has two parts: rule part and spatial setting. If the pixel falls into the influenced area of an exclusion, for the rule part, SoLIM Solutions uses the MIN operation in fuzzy logic to integrate the optimality values derived from individual rules. This process is the same as the inference of a single instance stated in the "Inference of Instance" section above.
If distance similarity for this exclusion is disabled, then the minimum optimality value will be the overall output value for this exclusion. If the distance similarity is enabled, SoLIM Solutions uses the spatial setting to adjust the optimality value calculated using the rule part.The basic idea is that the geographically closer a location to an exclusion's central location, the more impact the exclusion will exert on the location, and the further a location to the exclusion's central location, the less impact the exclusion will exert on the location. The function of this adjustment is shown as below:
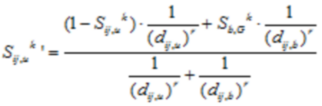
The meanings of the symbols in the equation are described as follows:
![]() : the adjusted optimality value at location (i, j) calculated based on exclusion u.
: the adjusted optimality value at location (i, j) calculated based on exclusion u.
![]() : the optimality value calculated using the rule part of exclusion u.
: the optimality value calculated using the rule part of exclusion u.
b : when we draw a straight line that passes the central point and the pixel to be inferred, it will has two intersections with the boundary of the influence area of exclusion u. Of the two points, b is the one that is on the same side with the pixel to be inferred
![]() : the distance (surface distance or horizontal distance) between the location (i, j) and exclusion u.
: the distance (surface distance or horizontal distance) between the location (i, j) and exclusion u.
![]() : the distance (surface distance or horizontal distance) between the location (i, j) and boundary point b.
: the distance (surface distance or horizontal distance) between the location (i, j) and boundary point b.
![]() : the optimality value at boundary point b calculated with global knowledge (instances).
: the optimality value at boundary point b calculated with global knowledge (instances).
r : distance decay factor
Derivation of Final Similarity Value (membership integration):
| • | If the pixel does not fall into the influenced areas of any occurrences or exclusions, the maximum of the optimality values among all instances will be chosen to be the final similarity value for soil type k at the pixel location. |
| • | If the pixel falls into the influenced areas of one or more occurrences, but it does not fall into the influenced area of any exclusions, the maximum optimality value among all the occurrences will be the final similarity value for soil type k at the pixel location. |
| • | If the pixel does not fall into the influenced areas of any occurrences, but it falls into the influenced areas of one or or more exclusions, the minimum optimality value from exclusions will be the the final membership value for soil type k at the pixel location. |
| • | If the pixel falls into the influenced areas of one or more occurrences and at the same time it also falls into the influenced area of one or more exclusions, the program will firstly get the maximum optimality value from all occurrences and then choose the minimum optimality value from all exclusions. Between the two values, the smaller one will be the the final membership value for soil type k at the pixel location. |